-
SDV Architecture에서 OTA와 자동차 CAN FD ( ft. 캔 통신이란?)카테고리 없음 2023. 12. 1. 14:28반응형

SDV Architecture에서 OTA와 자동차 CAN FD ( ft. 캔 통신이란?) 소비자들이 Tesla 에 열광하는 이유는 디자인이 멋있는 전기차라기보다는 OTA 소프트웨어 업데이트를 통해 차량 기능을 개선시킬 수 있고, 선구적인 자율주행차라는 미래지향적인 이미지 때문일 것이다.
SDV Architecture에서 OTA는 필수이며 이와 관련하여 캔통신 방식중 하나인 CANFD역시 중요성이 커지고 있습니다. 물론 이와 관련해서 다른 의견도 있습니다.
그래서 오늘은 DV Architecture에서 OTA와 자동차 CAN FD에 대해서 알아보겠습니다.
1. SDV Architecture에서 OTA

SDV 는 용어에서 알 수 있듯이 소프트웨어로 정의된 차량을 뜻합니다. 차량의 인포테인먼트, 바디/섀시, ADAS 와 같은 기능을 다양한 소프트웨어를 통해 업데이트(OTA)를 할 수 있는 것을 의미합니다.
인포테인먼트의 예를 들면 차량 계기판에 표시되는 여러가지 UX/UI 를 변경하기 위해 차량은 새로운 데이터를 클라우드로부터 전송받게 됩니다.
이 과정에서 차량의 소프트웨어는 차량클라우드를 이어주는 역할을 수행합니다. ADAS 도 마찬가지구요. 안전 경보 시스템이 작동하지 않거나, 차선 유지 기능에 오류가 있다면 새로운 패치 데이터를 클라우드로부터 전송받아야 합니다.
ADAS 의 수준이 자율주행으로 발전하고, 차량 내부 인포테인먼트 시스템의 다양화에 따라 차량-클라우드에서 일어나는 OTA 데이터는 더욱 증가할 것이다. 마찬가지로 이를 제어하고 통제하는 소프트웨어의 중요성 또한 높아질 것은 분명합니다.
MCU 를 작동시키는 방법에는 크게 ① FreeRTOS, ② 펌웨어와 같이 두가지가 있습니다. FreeRTOS 는 타 RTOS 대비 용량이 작기 때문에, 메모리 공간이 적은 MCU 에 사용하기 적합하지요.
FreeRTOS 는 일반적으로 컴파일된 단일 형태로 메모리에 플래싱해서 사용합니다. 하지만 단일 Kernel 만을 제공하고 있기 때문에 각종 Driver Kit, Network Stack, Library 은 MCU 공급 업체의 SDK 를 통해 구축해야 하는 단점이 있습니다.
또 하나의 구동 방식 중 하나인 펌웨어는 MCU 에 입력되어 있는 일종의 마이크로 컨트롤러입니다. 펌웨어 방식은 OTA 를 통해 새로운 소프트웨어를 MCU 의 메모리에 저장하게 됩니다. 새로운 소프트웨어가 문제가 생겼을 때를 대비하여 이전 소프트웨어를 메모리에 저장하는 Fallback Mechanism 이 대표적인 기능이라고 할 수 있습니다.
2. SW지속성 및 영속성 그리고 CANFD
소프트웨어 정의 자동차(SDV)의 지속가능성은 기존 양산된 자동차에 탑재된 소프트웨어의 변경을 넘어 이전에 설계되지 않은 새로운 소프트웨어의 탑재가 가능한 소프트웨어의 재구성에 달려있습니다.
자동차영역에서도 이미 소비자에게 친숙하게 다가온 OTA를 통한 소프트웨어의 업데이트는 처음 시스템을 설계 할 당시에 고려된 하드웨어, 소프트웨어 및 E/E 아키텍처를 기반으로 기능/성능을 업데이트 할 수 있습니다.
현대자동차의 GV60은 OTA를 통해 차량의 동력 성능(VCU), 브레이크(IEB), 스티어링(MDPS), 전자제어 서스펜션(ECS), 페이스 커넥트, 자율주차 등 차량 전반의 성능 및 기능 개선이 가능합니다.
BMW의 리모트 소프트웨어 업그레이드(RSU)를 비롯해 도요타, 폭스바겐 등 미래 SDV(Software-defined Vehicle)를 위한 차세대 아키텍처 기술개발을 하고 있습니다.
현재의 자동차 전기전자 아키텍처는 수 십개의 ECU가 전통적인 차량 네트워크인 CAN, CAN FD 등을 통해서 데이터를 주고받으면서 기능을 구현하고 있어, 한 개의 기능을 업데이트 하는 경우에도 다수의 ECU에 대한 업데이트가 필요합니다.
예를 들어, 차선이탈보조시스템의 경우 전방카메라ECU, 주행보조ECU, 스티어링제어 ECU를 비롯하여 각종 차량정보(속도, 기어, 턴시그널 등)를 사용하고 있습니다.
차량자체의 주요 통신수단인 CAN, CAN FD의 경우에는 수백Kbps에서 수Mbps 정도의 통신대역폭을 가지고 있어 단 하나의 소프트웨어를 변경하는 경우도 다수의 ECU까지 업데이트하기 위해 많은 시간이 필요하고, 협업해야 하는 주체도 다양하여 적시에 기능을 구현하기에 어려움이 발생합니다.
특히나, 차량을 설계하는 당시에는 고려하지 않았거나 개발되지 않았던 소프트웨어를 탑재하는 경우까지 고려하면 그 복잡성이 기하급수적으로 높아지게 됩니다.
소프트웨어 정의 자동차는 이를 소프트웨어 중심 아키텍처(SOA, Service-oriented Architecture)의 적용을 통해서 해소할 수 있을 것으로 전망하고 있습니다.
소프트웨어 중심 아키텍처는 기존의 차량 기능을 서비스의 관점에서 다시 설계하여 향후 변경/추가/삭제에 유연성을 확보하는 것을 목표로 하고있습니다.서비스는 소비자에게 제공할 수 있는 차량의 기능을 표현하는 단위로 상호조합 가능한 독립된 단위 소프트웨어로 구성되어 표준화된 인터페이스를 통해서 연결됩니다.
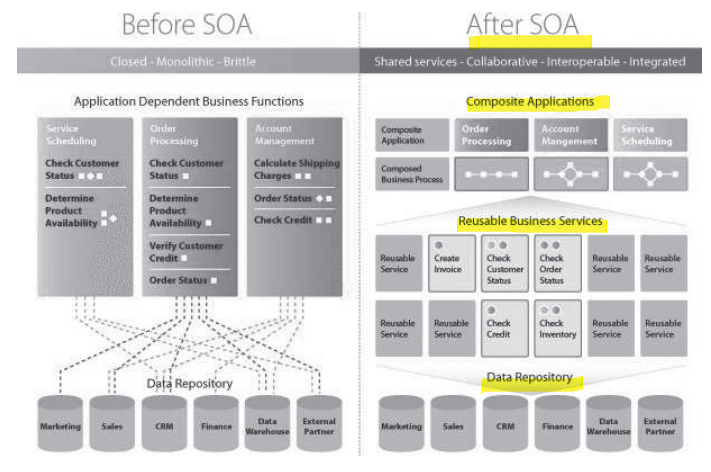
서비스 오리엔테이션 아키텍처 적용 전/후 3. CANFD는 대체되는가?
자동차는 ECU (전자 제어 장치) / CAN (Controller Area Network) 기반 네트워크를 사용하는 기존의 전략을 변경할 필요가 있습니다.
Ethernet과 소위 서비스 지향 아키텍처 (SOA : Service Oriented Architecture)를 기반으로 한 전자 시스템 아키텍처로 전환 은 이미 진행되고 있습니다.
SOA는 IT / 클라우드 업계에서 많이 사용되고 있고 다양한 혜택을 제공하고있다. "Amazon Web Services (AWS)"또는 Microsoft "Azure"다른 클라우드 플랫폼을 사용하는 거의 모든 기업을위한 기반을 구축하고 있습니다. SOA가 제공하는 수많은 장점은 자동차 전자 시스템에 적용하는 것이 가능하다는 것입니다.
Ethernet은 자동차 전자의 새로운 버스 아키텍처이 대안으로 논의되어 왔습니다. 속도 및 물리적 특성 등의 측면에서 다양한 버전의 Ethernet이 존재하고 현재도 또한 종류가 증가하고 있습니다.
이들은 자동차 요구 사항의 모든 요구 사항을 충족 속도와 무게, 비용 등의 측면에서 다양한 혜택을 얻을 수있는 것이다. 지금 당장은 아니더라도 가까운 미래에 실현 될 수있을 것입니다.
Ethernet의 주요 장점은 사이버 보안의 구현에 적합한 특성을 갖추고 있다는 점이있다. Ethernet은 내장 사이버 보안의 다른 미래의 모든 자동차 아키텍처에서 필요로하는 OTA 업데이트가 매우 간단하게 설계됩니다.
CAN 버스 및 캔통신이 지금까지 약 30 년 동안 자동차 산업의 주력이되어 왔습니다. 그러나 이제 그 기능은 다양한 버전의 Ethernet에 크게 뒤지고 있습니다.
CAN에 많은 개량이 더해져, 그 중에서도 CAN-FD는 다양한 성능 향상을 이루어졌습니다. CANFD는 2012 년에 출시 된 단기적으로는 잘 작동했지만, 장기적인 해결책은되지 않을 것으로 전망됩니다.
CAN-FD는 CAN 통신이 향후 시스템 아키텍처에서 항상 지배력은 점점 약해질 것으로 보입니다. 물론 당장은 아닙니다.
CAN 버스는 Ethernet에 비해 속도가 낮습니다. 물론 FlexRay 기술로 대체 될 수는 있지만, 향후 성능 향상을 실현하고도 기세를 타는 Ethernet에 대항하는 것은 쉽지 않을 것입니다. 사이버 보안(Cybersecurity) 취약점도 지적되고 있는 상황이죠.
물론 CAN 버스의 주요 장점으로는 방대한 개발과 채용 사례를 기반으로 한 범용성일 것입니다. 그러나 이러한 장점은 향후 몇 년간 계속 감소 할 것으로 보이고 현재는 유지 및 레거시 시스템 유지의 수단으로 사용될 것으로 보입니다.
SOA의 주요 장점은 재사용 가능하다는 점과 서비스 인터페이스를 통해 상호 운용 가능한 소프트웨어 플랫폼이라는 점을들 수있습니다. 하이테크 업계에서는 이러한 장점을 활용하여 대규모 SOA 에코 시스템을 구축하고 있습니다.
SOA는 이러한 장점을 통해 반도체 칩과 시스템 소프트웨어 플랫폼 등의 분야를 시작으로 성장을 확대하고 클라우드, SaaS (Software as a Service) 플랫폼 등으로 급성장 했습니다.
자동차 업계는 이미 이러한 SOA 기반의 SaaS 클라우드 플랫폼의 이점을 이용하고 있는 상황입니다.
그리고 AI (인공 지능) 개발 분야도 SOA의 미래적인 성능 향상과 기술 발전에 의존하고 있습니다. 기계 학습과 신경망 등의 AI 분야는 향후 자동차 시스템 아키텍처에 영향력을 주고 있습니다.
특히 자동 운전 자동차의 고성능 컴퓨터 시스템은 AI와 SOA에 대한 의존도가 점점 높아지고 있습니다.
SOA-Ethernet 시스템에 여러 산업에서의 투자는 소프트웨어, SaaS, 클라우드 플랫폼을 포함한 자동차 시스템 아키텍처에 큰 보탬이 될 것 입니다.
그리고 자동차의 전자 시스템에 사용되는 프로세서, 메모리, 센서 등의 기술도 마찬가지로 진보와 혁신을 이루고 있습니다.
SOA와 이더넷을 기반으로 한 클린 시트 아키텍처를 채택하고있는 기업은 BEV의 신생 기업에 한정되어 있습니다. 이들 기업은 Tesla의 뒤를 쫓고 있지만, 일부 기업은 Tesla의 성과를 넘어 서고 있습니다.그 이유는 Ethernet 버전의 선택이 많은 SOA의 에코 시스템을 갖추고 있기 때문입니다.4. AutoSAR 기반 SW(현재 오토에버)

현대오토에버가 제공하는 Mobilgene 은 AUTOSAR 기반의 Basic S/W 로, Classic, AD, Adaptive 으로 분류된다. Mobilgene Classic 은 현대오트론이 개발한 소프트웨어로, 샤시, 바디 등 MCU 기반의 부품을 제어하는 역할을 한다.
즉, 바디제어를 담당하는 ccOS.e에 적용된다. 2016년 그랜저에 탑재한 1세대 전자제어 아키텍쳐를 시작으로 현대차그룹을 중심으로 확장하고 있으며, 이후 2025 년까지 전 차종에 적용하는 것을 목표하고 있다.
Classic은 저사양 중심의 4.0.3과 고사양 중심의 4.4.0으로 나뉩니다.(위의 그림 참조)
각 버전의 특성을 고려하였을 때 ccOS.e 내에서도 Classic 4.0.3 은 Comfort 를 중심으로, 4.4.0 은 ADAS 를 중심으로 확대되고 있는 것으로 파악됩니다.
4.0.3 은 현 OEM 사양에 최적화된 플랫폼으로, 스마트키, 원격 시동 등에 적용되는 저사양 제어기를 통합합니다. 또한 일부 모듈만을 CANFD, 이더넷, E2E, AUTOSAR NM 등의 사양을 맞추기 위해 4.2~4.3 버전으로 업그레이드하였습니다.
이후 차량의 성능이 발전하면서 ADAS, 인포테인먼트 등에서 더 높은 사양의 제어기가 요구되었다.
이에 발맞춰 최신 AUTOSAR 기반의 4.4.0 이 출시되었습니다. 현재는 버젼이 더 올라가 있을 것으로 예상됩니다.반응형댓글